טרטלבוט - רובוט מחקר אישי בתוכנה פתוחה
הטרטלבוט הוא דור חדש של רובוטים ניידים.
רובוטיכאן היא המפיצה הרשמית של הטרטלבוט בישראל




ללא התפשרות ביכולת, ביצועים ואיכות.
טרטלבוט הוא ערכה רובוטית בעלות נמוכה בעלת קוד פתוח (open source). הטרטלבוט הומצא בקליפורניה בחברת Willow Garage על ידי מלאני וויז וטאלי פוט בנובמבר 2010.
עם טרטלבוט, תוכלו לבנות רובוט שייסע מסביב לבית, יציג תצוגת תלת מימד ויהיה בעל עוצמה מספיקה ליישומים נרחבים.
למידע טכני, אנחנו ממליצים לעקוב אחר אתר היצרן.
ראספברי פאי
כל מערכות הטרטלבוט מאז 2021 מצוידות בראספברי פאי 4 - מחשב לוח יחיד מהפופולאריים בעולם המשומש על ידי תלמידים ומפתחים וחברות מסחריות כאחד. ראספברי מוערך מאוד בשל העלות, השימושים הרבים שהוא מציע והקוד הפתוח שלו.
עלות נמוכה
מלבד היתרון הכלכלי, מחיר נמוך נותן גישה לקשת רחבה של מפתחים ולקוחות, מה שמצד אחת מוריד עלויות ייצור ומצד שני מגדיל את כמות המידע והדוקומנטציה המוצעת למפתחים.
קוד פתוח
תוכנת הטרטלבוט היא קוד פתוח, כלומר שכל אחד יכול לקרוא ולפתח כרצונו מרמת התכונות הבסיסיות ביותר
קוד פתוח
The TurtleBot can run SLAM (simultaneous localization and mapping) algorithms to build a map and can drive around your room. It can also be controlled remotely from a laptop, joypad or Android-based smart phone.
Manipulation
The TurtleBot can run SLAM (simultaneous localization and mapping) algorithms to build a map and can drive around your room. It can also be controlled remotely from a laptop, joypad or Android-based smart phone.
מיפוי והתמצאות
The TurtleBot can run SLAM (simultaneous localization and mapping) algorithms to build a map and can drive around your room. It can also be controlled remotely from a laptop, joypad or Android-based smart phone.
ROS
The TurtleBot can run SLAM (simultaneous localization and mapping) algorithms to build a map and can drive around your room. It can also be controlled remotely from a laptop, joypad or Android-based smart phone.
Manipulation
לתכונת הניווט המרשימה של הטרטלבוט מתווסף מימד חדש כשמרכיבים עליו רכיבים, לדוגמא צבת הOpenMANIPULATOR של רובוטיס (אחת משותפות הפיתוח של הטרטלבוט) שמאפשרת לו ליצור אינראקציה (Manipulation) עם עצמים בסביבתו.
מיפוי והתמצאות
הטרטלבוט יכול להריץ אלגוריתם SLAM (simultaneous localization and mapping) בכדי ליצור לעצמו מפה ולנווט את עצמו בסביבה. הוא גם יכול להישלט באופן אלחוטי דרך מחשב, שלט Joypad או טלפון מבוסס על אנדרואיד.
ROS
ה-Robot Operating System (ROS) הוא פריימוורק קוד פתוח שעוזר לחוקרים ומפתחים ליצור ולחלוק בינהם אפליקציות רובוטיות.
TurtleBot 3 Waffle Pi
טרטלבוט 3 הוא פלטפורמת ROS רובוטית. הוא הומצא בהשראת ה Turtle Robot, ופועל באמצעות שפת התוכנה Logo בשנת 1967.
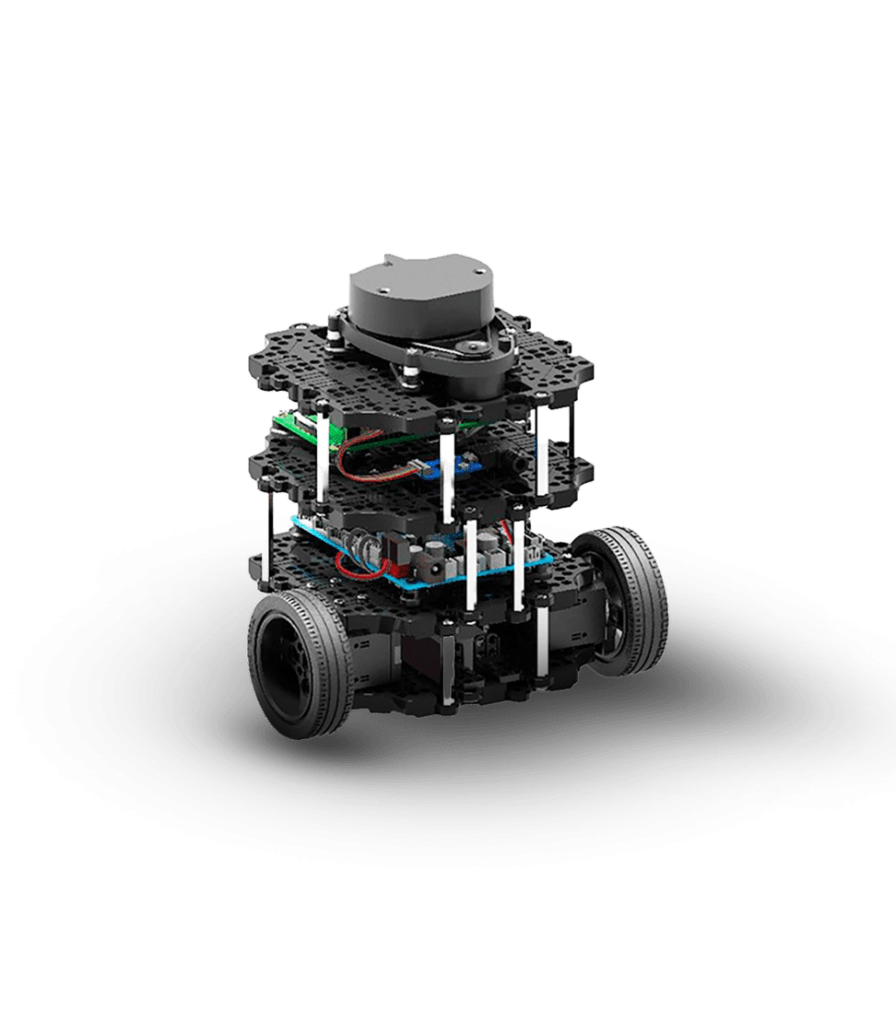
TurtleBot 3 Burger
בנוסף, מצב ה”צב” שלו, שמופיע לראשונה במדריך הבסיסי ל-ROS, הוא תוכנה המחקה את תוכנת הפקודות של הצב המקורי בLogo.
הטרטלבוט גם משומש כדי למתג את סמל הצב בתור הלוגו של ROS: תשע הנקודות שבלוגו של ROS באו מתשע הנקודות על גבו של הצב בלוגו של טרטלבוט.


TurtleBot 3 Waffle
טרטלבוט, שמקורו בצבים שפותחו בשפת LOGO, בנוי בכדי ללמד משתמשים חדשים את ROS בנוסף לתכנות ב-LOGO. עם השנים הפך הטרטלבוט לפלטפורמה הסטנדארטית של ROS והפופולארית ביותר בקרב מפתחים וסטודנטים.